The Tsinghua University “Challenge Cup” Student Extracurricular Academic and Technological Works Competition is a university-wide event co-organized by the university’s Academic Affairs Office, Research & Development Affairs Office, the Graduate School, the Youth League Committee, and the Student Association for Science and Technology. Having been held 38 times, it is the largest, highest-level, and most influential student extracurricular scientific and technological competition with the longest history at Tsinghua University.
The following are outstanding works from previous years:
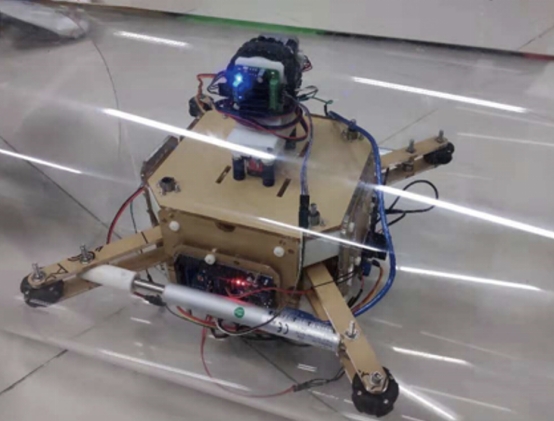
The work of Yu Chang’s team, the “Integrated Bar-type Pipeline Robot with Adaptability to Complex Pipelines”, secured the Top Prize in the “Challenge Cup”. The innovative design of the robot, featuring adaptable driving wheels, enables it to navigate various challenges presented by bends, tees, and vertical pipes in urban areas. Additionally, it can rotate and even spiral forward through curves, making it an effective vehicle for pipeline detection and repair. The official microblog of Tsinghua University also reported on this work.
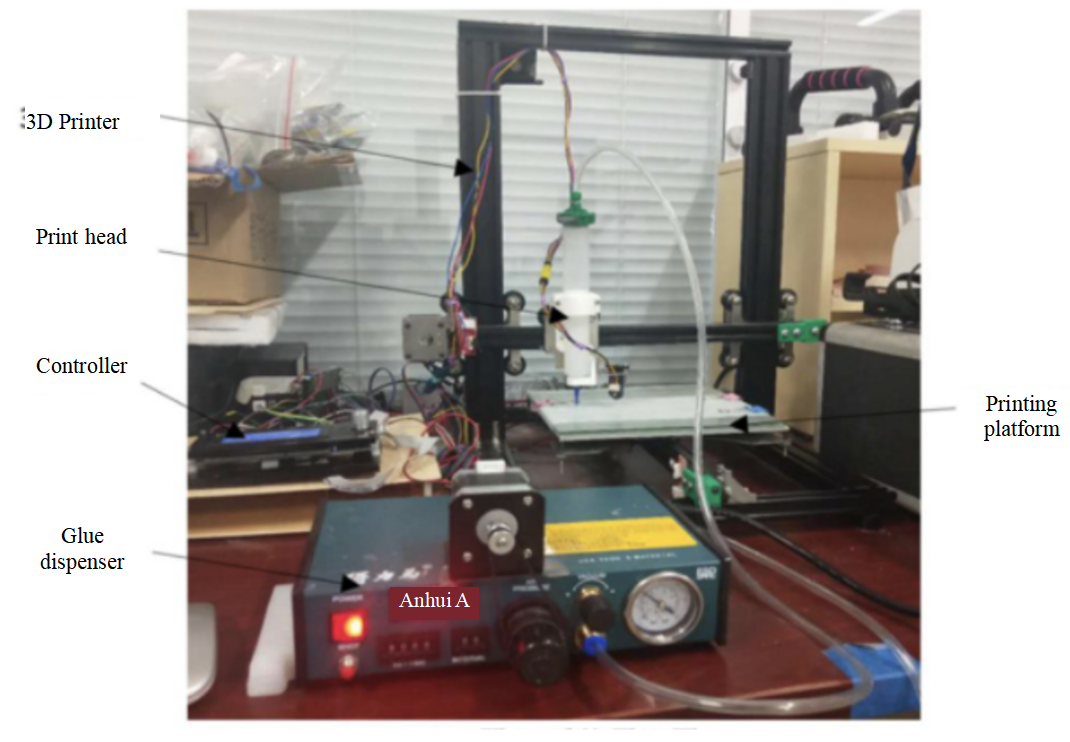
The project “Silicone 3D Printer” by Duan Jinhao’s team won the second prize in the “Challenge Cup”. Traditional 3D printers frequently face challenges when it comes to printing flexible materials. On the other hand, 3D printers designed for flexible materials, such as silicone, often encounter issues such as cumbersome size, intricate processes, and low printing efficiency. Considering the strengths and weaknesses of current printers and printing techniques, this project undertakes modifications and research with a focus on the printing process based on a desktop 3D printer. The result is a desktop silicone 3D printer that utilizes Dow Corning 737 silicone as consumables, complete with corresponding printing methods. This printer produces items with high interlayer bonding, minimal printing defects, and excellent mechanical properties. It excels in both printing efficiency and material conservation. Furthermore, it provides the flexibility to attach extra nozzles for printing support structures with soluble materials, facilitating the completion of intricate structural part printing.
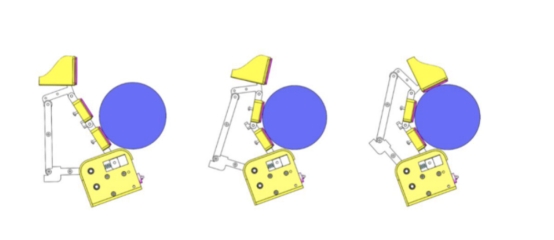
Zhang Yunjia’s team secured the third prize in the “Challenge Cup” for their project, the “Linkage-based Adaptive Finger”. This project employs a linkage to create a novel robot finger that has two grasping modes: parallel grasping and adaptive grasping. The robot finger consists of three segments, with the end segment capable of horizontally holding an object and the middle two segments able to grasp the object adaptively. When the middle finger segment makes contact with the object, the force applied to the finger enables a soft, enveloping grasp.
Compared with conventional parallel-gripping self-adaptive fingers, this finger displays faster performance in enveloping grasp. Driven by a single motor, it allows for effective multi-mode grasping through worm drive by employing one active linkage, multiple slave linkages, springs, and stop blocks. The new robot finger boasts exceptional advantages including high gripping stability, broad adaptability, a relatively simple structure, comparatively low manufacturing cost, and easy control. It has the potential to be extensively applied in areas such as logistics robots, bio-robots, and other related fields.

The project “Intelligent Seeder for Small Farmland” earned the team led by Wang Pengbing the third prize in the “Challenge Cup”. This work introduces an intelligent crawler-type seeder designed for small farmland. By integrating a mechanical arm with traditional manual instruments and employing mechanical automation control, it optimizes advantages and mitigates disadvantages, particularly in the context of corn seeding in farmland. The objective is to enhance the level of agricultural mechanization in rural areas and promote the robust development of agriculture.






