清华大学“挑战杯”学生课外学术科技作品竞赛是由清华大学教务处、科研院、研究生院、校团委和校学生科协共同主办的全校性学生课外学术科技作品竞赛,至今已举办了38届,是清华大学规模最大、历史最长、水平最高、最具影响力的学生课外科技赛事。
往届优秀作品展示:
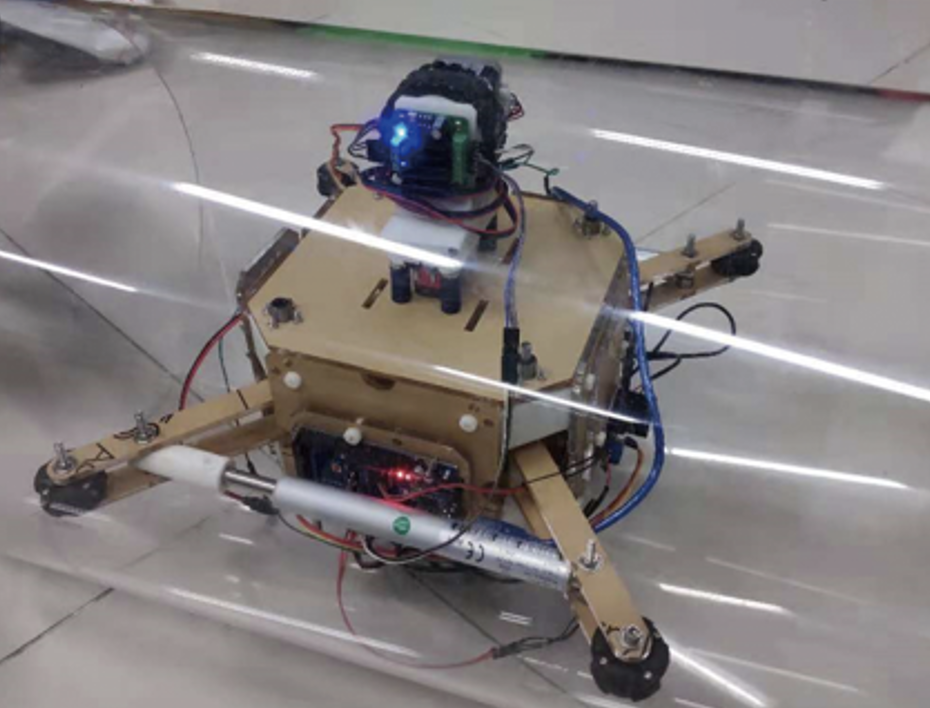
余畅团队的作品“适应复杂管道的一体化杆式管道机器人”获得了“挑战杯”特等奖。通过创新性的驱动轮设计,该机器人可适应城市管道的各种复杂情况,如弯角、三通、竖直管道;还可在弯道内旋转甚至螺旋前进,可以作为管道探测、修复的有效载具。我校官方微博也对本作品进行了报道。
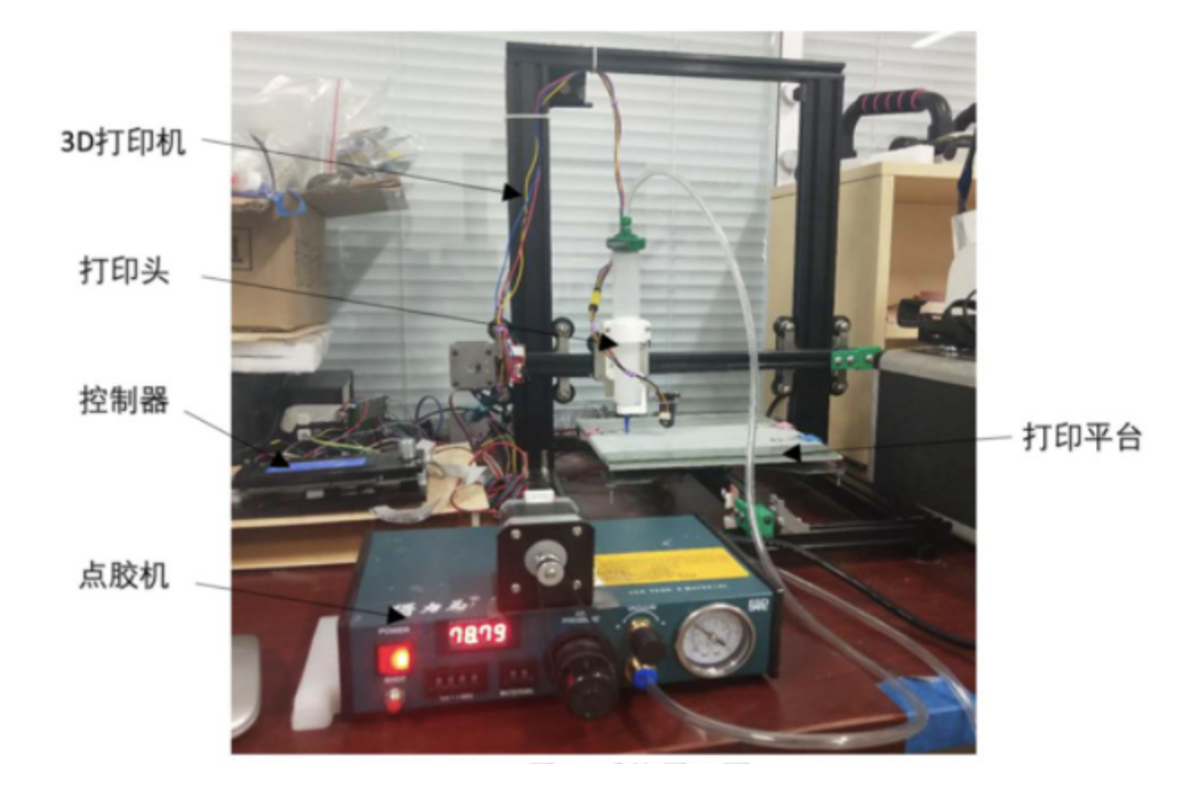
段金昊团队的“硅胶3D打印机”项目获得“挑战杯”二等奖。现有的3D打印机大都无法打印柔性材料,打印硅胶等柔性材料的3D打印机存在体积庞大、流程复杂、打印效率低等问题。该项目针对现有打印机和打印工艺的优势和不足,本项目在一台桌面级3D打印机的基础上开展改装和打印工艺研究,以Dow Corning 737硅胶为耗材,开发了一台桌面级硅胶3D打印机及其对应的打印工艺。该打印机打印产品层间粘结度高、打印缺陷少,具有良好的力学性能;打印效率高,节约打印材料;打印机可额外加装喷头,以可溶性材料打印支撑结构,从而完成复杂结构件的打印。
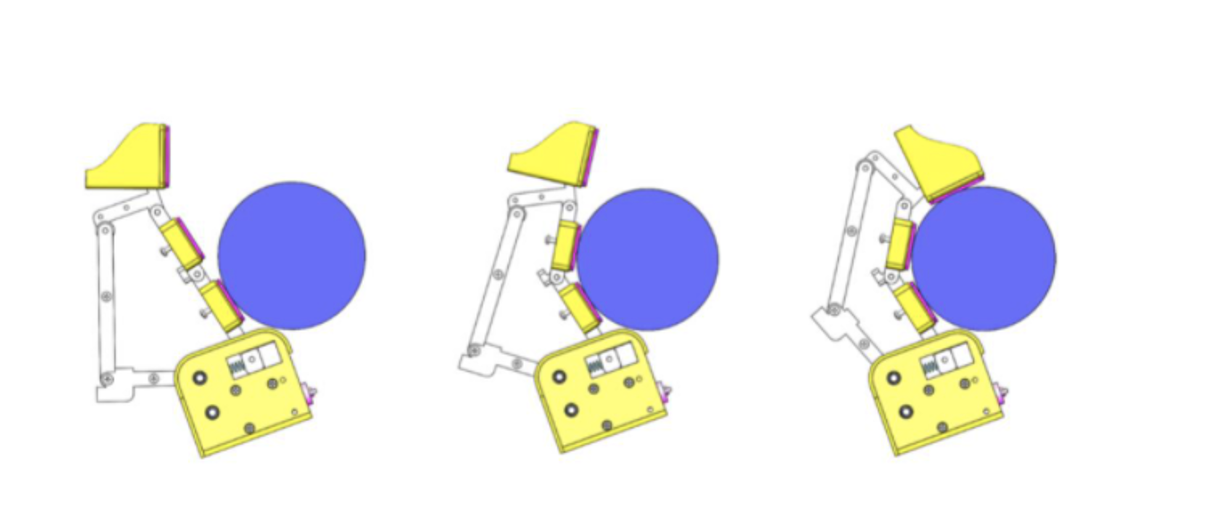
张芸嘉团队的“连杆自适应手指”获得了“挑战杯”三等奖。该项目运用连杆机构实现了一种新型的具有平夹和自适应两种抓取模式的机器人手指。该机器人手指有3个指段,末端指段能够水平夹持物体,中间两个指段能够自适应抓取物体。当中部指段碰到物体后,手指受力会实现柔顺包络抓取。
该手指相比传统平夹自适应手指的包络抓取更快速。该手指仅通过1个电机驱动,通过蜗轮蜗杆传动,运用1个主动连杆、多个从动连杆、弹簧和限位块等实现良好的多模式抓取。该新型机器人手指具有抓取稳定性高,适应面广,结构相对简单,制造成本比较低,控制容易等突出优点。该手指具有广泛的应用前景,比如物流机器人、仿生机器人等领域。

王鹏兵团队的“小型农田智能播种小车”获得“挑战杯”三等奖。本作品提出了一种适用于小型农田的智能履带式播种小车,将机械臂和传统的手工器械相结合,扬长避短,将机械自动化控制应用于农田玉米播种,旨在提高广大农村地区的农业机械化水平,促进农业大力发展。




