物体的接触界面上往往存在着不同的应力分布,这些应力分布会在诸多的物理过程、生物行为和工业应用中发挥重要作用,例如动物的爬行、人手的触觉感知和灵巧操作,以及齿轮等机械零部件的传动等。但是,现有接触应力测量手段,包括电子皮肤和牵引力显微镜等,都难以对界面三维接触应力的分布和演变特征进行高时空分辨测量,这限制了对相关界面力学现象和行为的深入理解。
近日,机械系摩擦学国家重点实验室研究团队提出一种基于双目立体视觉和弹性力学模型数值求解的界面动态三维接触应力高分辨率测量方法。该方法基于透明弹性体设计了特殊的特征图像层和遮光层,利用内置的双目相机和数字图像相关算法实现弹性体接触表面的三维变形重构,基于弹性力学模型的实域卷积迭代算法实现高数值稳定性的接触应力解算,实现了空间分辨率和时间分辨率分别为10 μm和10 ms的三维接触应力测量,并且该时间和空间分辨率可以比较方便地通过调节光学系统的性能而进一步提高。
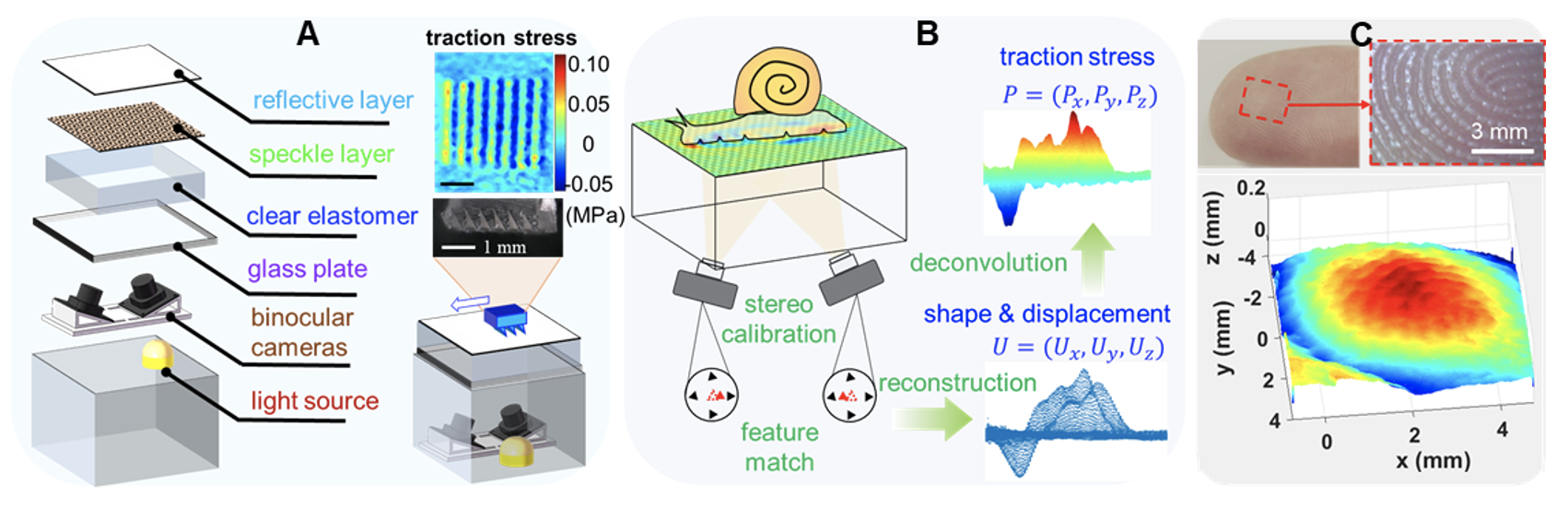
图1. 界面三维接触应力测量方法示意图。(A)测量装置的多层结构示意图;(B)接触表面变形场测量和应力场计算原理图;(C)手指的接触形状表征
利用所设计的原型装置,不仅实现了对Hertz,JKR等经典接触力学模型的实验验证,还成功应用于多种界面力学行为的研究。粘着应力测量中,对微柱阵列干粘附表面的粘着应力演变进行了直接测量,这对仿生干粘附表面的结构优化设计和可靠性监测具有重要意义。滚动摩擦测试中,通过对比干接触和润滑条件下测得的滚动摩擦应力分布,直观展示了弹性阻力组分和表面粘着组分在不同接触区域对滚动摩擦起源的贡献。蜗牛的爬行机理研究中,基于蜗牛爬行过程的界面三维接触应力测量,对蜗牛爬行机理中经典的粘液“屈服-愈合”机制进行完善,系统研究了蜗牛空间爬行的力学机制,揭示了踏板波的微吸盘效应调控的局部润滑状态是蜗牛依靠摩擦不对称性爬行的关键,明确了蜗牛腹足的多尺度的吸盘效应和分段密封效应是其能够以水平、竖直和倒置等多种位姿进行空间爬行的重要力学基础。所提出的方法展现的高时空分辨率的界面三维接触应力动态测量能力,在物理学、生物学和机器人等诸多科学和工业领域具有广泛应用前景。
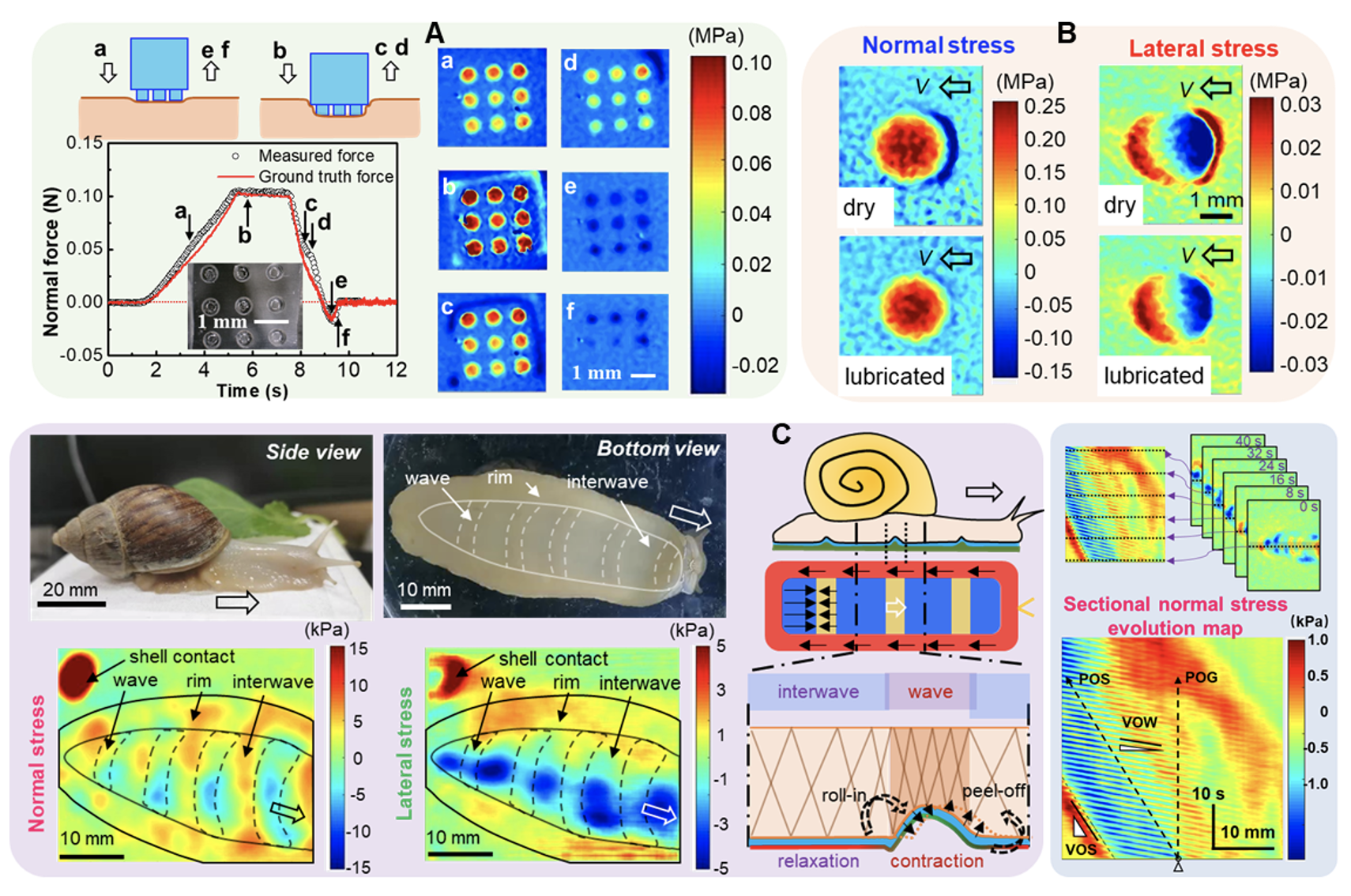
图2. 典型接触应力测量结果。(A)仿生干粘附表面粘着应力;(B)滚动摩擦的弹性阻力贡献和表面粘着贡献;(C)蜗牛爬行过程的应力图和应力演变图
该研究近期发表于《科学进展》(Science Advances)期刊,论文题为“动态三维牵引应力成像”(Imaging dynamic three-dimensional traction stresses)。论文第一作者为机械系2017级直博生李远哲,共同通讯作者为机械系田煜教授和马丽然副教授。机械系孟永钢教授、白鹏鹏助理研究员,博士后曹辉,博士生李绿洲、李新新、侯鑫、方静泊,航院本科生李京洋等共同参与了研究工作。该研究受到国家自然科学基金(51425502和52175176)、摩擦学国家重点实验室自主研究课题(SKLT2020B05)以及清华大学国强研究院等项目资助。
论文链接:https://doi.org/10.1126/sciadv.abm0984




